作品编号:C558(三等奖)
作品名称:基于ArcGIS Server的军事越野通行影响分析系统
作者单位:郑州大学水利与环境学院
小组成员:樊荣,郑家祥,夏光平,曹楠
指导老师:武舫
- 开发背景与设计思想
- 开发背景
随着IT技术和GIS技术的快速发展,军用GIS的应用日新月异。党的十九大提出坚持走中国特色强军之路,全面推进国防和军队现代化,军事人员、武器装备现代化,树立科技是核心战斗力的思想,建设创新型人民军队。新形势下,军民融合和军队现代化已经上升为国家改革重中之重,随着我国综合科技力量的发展与现代化进步,未来必将形成多维一体、跨越发展的军民融合深度发展局面。军事地理信息系统(军事GIS)旨在为军方提供专业的GIS应用,促进军民融合政策在地理信息领域的进一步落地。
未来战场爆发大规模战争的可能性降低,局部冲突、地区战争的小分队特种作战将会成为战争主要样式。北斗导航系统、GPS、电子地图、电子导航系统虽然得到广泛应用,但是地形图仍然是野外通行最基础的保障,也是指战员获取野外地区空间信息最实用、最根本的手段。
- 需求分析
军事越野通常是在野外生疏的地形上实施,运动前对地形、植被等情况,只能通过地图了解,而无法进入现地勘察。目前的军事越野行动需要军队队员在极度疲劳和高压下保持冷静的头脑,识图读图,精准判断,确定路线。那么,指战员在快速机动的环境中能否时刻保证对地形图的高速反应及准确判读就至关重要了,这对军事越野的效率及连带产生的军事行动成功与否都有很大影响。因此,在军事行动中,有效利用网络平台,实现快速、精确的军事越野通行路径选择及分析,对军事行动提供辅助决策,对于形成有利的战略战役态势,赢得主动,夺取胜利有着具有举足轻重的作用。
整个运动过程都是在野外不同的地形条件下展开,对地形的要求极为严格,行军中常常面临着克服山丘、森林、灌木、荆棘、杂草、河流、沟谷、洼地、陡坡等不利影响。军队越野能力是国家战略能力的重要组成部分以及军事实战化的必然要求,越野行军的快慢与方向准度直接影响了军事行动的结果。
目前,由于军事行动对地形的要求极为严格且现有的GIS分析服务难以满足军事越野通行的需求,因此复杂地形下的军事越野的影响因子的分析极为重要。我们将GIS专业知识与军事行动相结合,运用GIS 原理对地形图地理要素及分布进行详细判读、分析,筛选出障碍区,在众多地理要素中选择出野外可通行通道。
- 系统设计
本作品侧重于发布ArcGIS Web军事模块拓展服务,通过ArcGIS Server为其他军事应用平台提供军事越野通行中多要素复杂地形的障碍区地图展示服务以及可通行影响度GIS分析服务,并在系统中做出示例展示,为军方行动决策提供技术支持,提升军队越野行动效率与安全性。
- 功能设计
本系统是基于ArcGIS Server 的军事越野通行影响因子分析系统,主要提供以路径规划为基础的五大核心功能,包括综合查询、路径分析、区域统计、辅助决策和基本功能。
图表 1 系统总体架构图
首先,指战员通过向系统提供待通行区域的地形图及越野通行的出发点和目的地,系统即可快速分析出一条两点间最优的可通行路线,基于系统给出的通行路径,指战员可以对所得路径的各个区域进行缓冲区分析,以得到周边区域的地貌分布,还可了解周边地理要素的分布及详细属性信息。为了便于指战员进行战场模拟分析,我们还设计了态势标绘系统,通过绘制态势标绘符号,将复杂信息符号化,便于各级人员之间更好的进行战术交流及指令传达。
- 关键技术
- 障碍区提取
从复杂地形中提取不可通行区域(障碍区)。在野外通行中,对地形的认知程度直接影响了行军的可靠程度和决策的速度。我们模拟了精细的地表数据,结合网络开放的人造地表数据、植被数据,提取行军障碍区域,进而得到可通行区域地形数据,供野外路径规划使用。
- 处理得到彩色障碍区图。叠加30m植被覆盖数据、30m人造地表数据以及一比五万地形图(模拟数据)中的部分要素(包括河流、湖泊、深沟、陡崖、桥梁等),得到彩色障碍区图。如下图。

图表 2 Step1_ColorfulMap.
- 通过二值化,得到二值化障碍区图。将障碍区图二值化处理是为了方便之后进行形态学处理。如下图。

图表 3 Step2_Binary.
- 通过使用ArcGIS中extract by attributes和检查拓扑关系,去除障碍区小碎斑、填充白色区域的空洞,得到下一效果图。去除小碎斑是为了防止小型障碍区对整体行军态势造成阻碍,填充空洞是因为在障碍区域中间,一定不允许行通行。如下图。

图表 4 Step3_Sieved_FillHole.
- 使用ArcScan扩展模块的膨胀(Dilation)和腐蚀(Erosion)闭运算得到最终效果图,这也是形态学中的经典处理方法。膨胀目的在于合并相近的障碍区域,如果两障碍区域距离较小,是不允许大型装甲车队通过的。腐蚀的目的在于还原可通行区域形态,使其更贴近现实。如下图。

图表 5 Step4_Dilation.

图表 6 Step5_Erosion.
- 路径规划算法
首先将提取得到的障碍区域矢量数据*.shp转化为*.navmesh的导航多边形文件(有源码)。之后,使用先进的导航多边形寻路算法(有源码),进行寻路。我们将其C++代码包装成为*.dll动态库文件,并将其导入ArcGIS Server拓展模块SOE开发中,结合AO进行开发,最终得到*.soe文件,发布到ArcGIS Server为各个平台提供路径规划服务。

图表 7 生成导航多边形俯视图
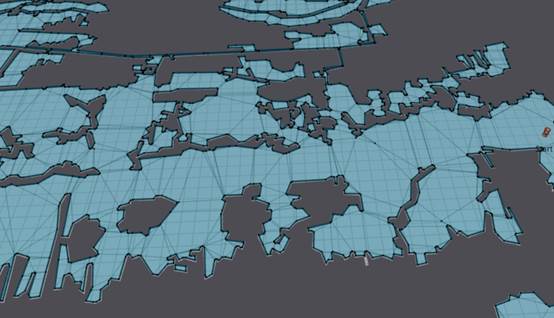
图表 8 导航多边形细节图
- 作品亮点
- 障碍区提取
野外通行对地形的掌握度要求极高,而且地形要素复杂,行军中常常面临着克服山丘、森林、灌木、荆棘、杂草、河流、沟谷、洼地、陡坡等不利影响。我们不局限于建筑或者水体等单一要素,而是采用多种地形要素综合影响的方法,结合GIS、形态学的处理方法,得到能够接近与实际地形相符合的、能够应用于寻路的数字化障碍区和通行区。
- 野外路径规划
目前, 大部分研究都是基于道路网络的路径规划分析, 对越野条件下的车辆通行分析研究较少。传统的处理越野条件下的车辆通行问题是采用正方形格网进行地形量化研究,然而, 真实环境的复杂性导致正方形网格不能满足实际的通行分析的需求。因此,我们采用导航多边形的方式实现道路的精细量化,再结合先进的路径规划算法,得到能够应用于军事履带车越野通行的GIS应用。